阿摩線上測驗
登入
首頁
>
測量平差法
>
103年 - 103年地方考四等_測量製圖#25204
> 申論題
題組內容
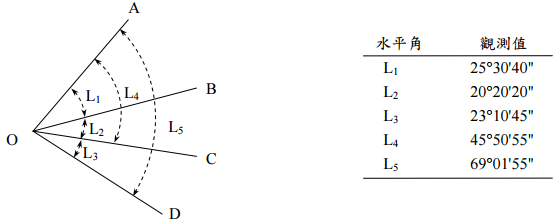
二、在下圖中,某人欲求定 A、B、C、D 四個方向間之水平夾角,各觀測值分別如列表 所示,並假設觀測值精度相等且彼此獨立不相關:
⑵請以最小二乘法進行平差計算,求得各觀測量之改正數、改正後觀測量以及改正 後之水平夾角值。(20 分)
相關申論題
⑴請列出線性化間接觀測平差方程式 V = AX - L 之各矩陣與向量(V、A、X、L) 之維度大小與內容元素。(20 分)
#34929
⑵請列出題⑴平差計算過程所需要的權矩陣。(5 分)
#34930
⑴求 K 及 C 之估值。(10 分)
#34932
⑵若以此經緯儀測一距離,得上下絲距為 0.25 m(垂直角為零),試求此距離及標 準差。(10 分)
#34933
三、當一平差軟體需處理大量未知數及大量觀測數據時(如超過數千個未知數及上百萬 觀測量),需要大量電腦記憶空間儲存設計矩陣、觀測數據及其權矩陣。然而,若 權矩陣為對角線矩陣時(即觀測數據間不相關),可於每讀一筆觀測量時,計算其 對法方程式之貢獻,而不需儲存設計矩陣、觀測數據及其權矩陣於電腦記憶體,此 方法稱直接組法方程式法。試以恰當公式說明此方法。(20 分)
#34934
⑴假設高程 y 及時間 t 之關係為 y = c + dt 。使用最小二乘法計算 c 及 d。(10 分)
#34936
⑵使用⑴結果預測在時間= 600 天的高程及其標準偏差。(10 分)
#34937
一、間接觀測平差為常見之平差解算模式,請證明在此模式下平差後未知參數之後驗權 係數矩陣可寫為Qxx=(ATPA)-1 ,其中 A為設計矩陣(未知參數之係數矩陣),P為 觀測量之權矩陣。(25 分)
#34938
二、一般實務應用上所遇到的問題通常無法以簡單線性模式加以分析,因此需仰賴非 線性模式進行解算。請說明非線性與線性模式之平差解算過程之主要差異,並舉出 至少兩種方式可用來判斷非線性模式之平差解算過程是否獲得穩定的解算結果。 (25 分)
#34939
⑴請計算 X 點高程之最或是值及其後驗標準差。(10 分)
#34941
相關試卷
114年 - 114 專技高考_測量技師:測量平差法#133674
114年 · #133674
113年 - 113 專技高考_測量技師:測量平差法#123916
113年 · #123916
112年 - 112 地方政府特種考試_四等_測量製圖:測量平差法概要#118357
112年 · #118357
112年 - 112 地方政府特種考試_三等_測量製圖:測量平差法#118336
112年 · #118336
112年 - 112 專技高考_測量技師:測量平差法#117672
112年 · #117672
112年 - 112 原住民族特種考試_四等_測量製圖:測量平差法概要#116432
112年 · #116432
112年 - 112 高等考試_三級_測量製圖:測量平差法(包括誤差理論及實務)#115538
112年 · #115538
112年 - 112 普通考試_測量製圖:測量平差法概要#115315
112年 · #115315
111年 - 111 地方政府特種考試_三等_測量製圖:測量平差法#112400
111年 · #112400
111年 - 111 地方政府特種考試_四等_測量製圖:測量平差法概要#112399
111年 · #112399
 阿摩線上測驗
登入
阿摩線上測驗
登入